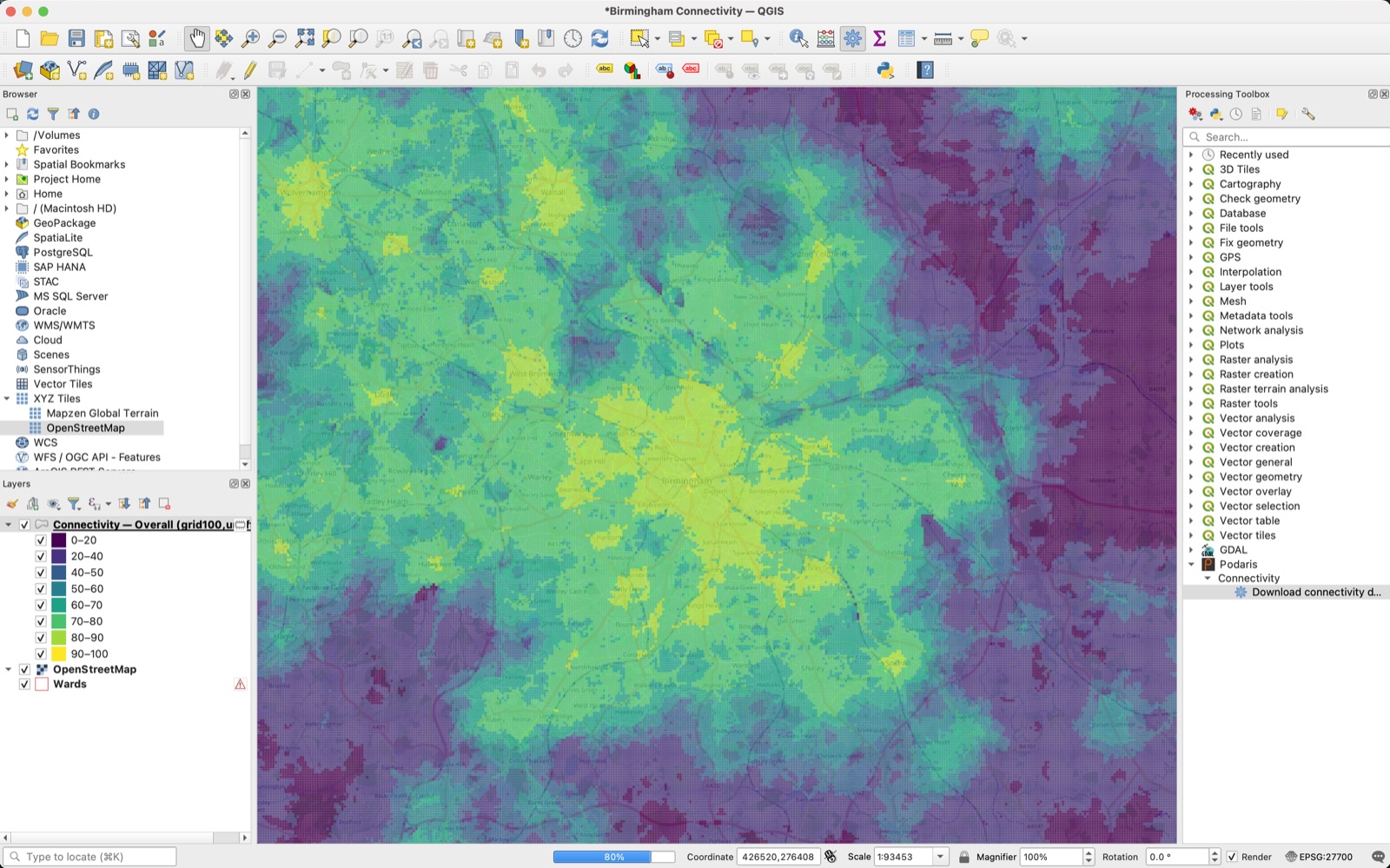
Connectivity data, straight into QGIS. Our free Podaris plugin, now in the official QGIS plugin repository, adds the DfT Connectivity Metric's published data to the Processing Toolbox, so you can pull a styled layer for any area of England and Wales without leaving your GIS.…
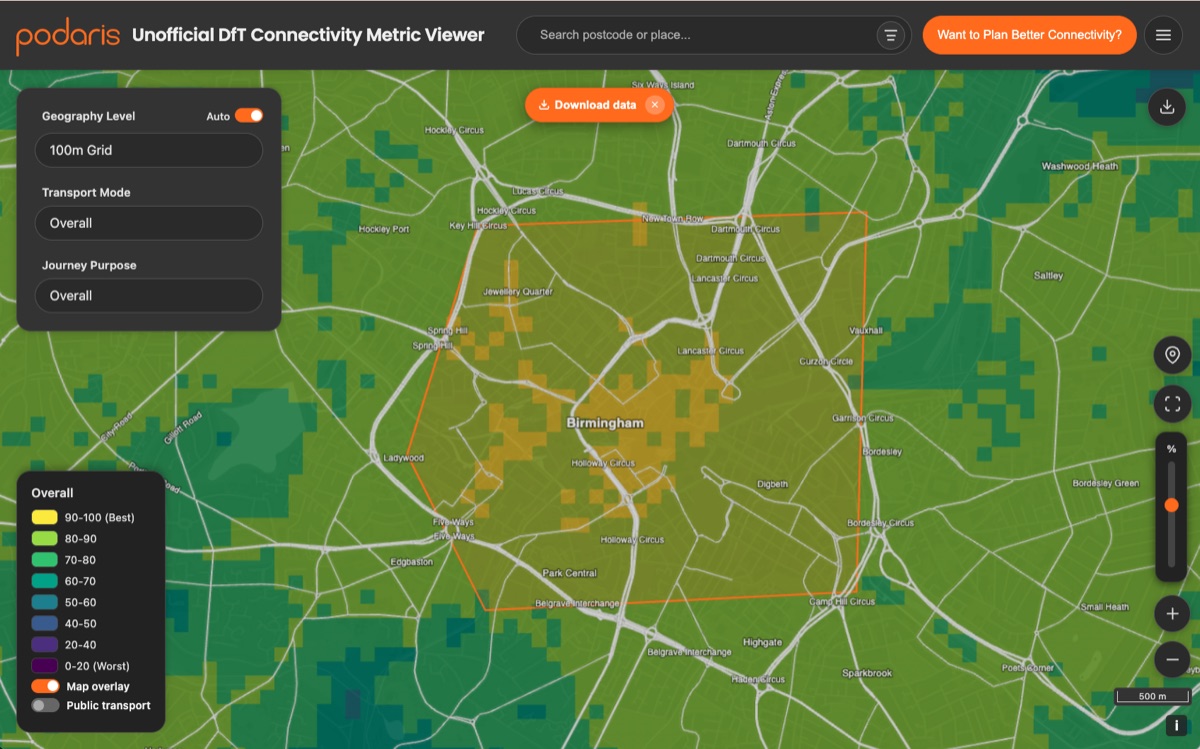
The official DfT tool lets you look at the new Connectivity Metric, but not download it. Our free, open visualiser now does. Here's how to export the data for OA, LSOA, local authority, region, or 100m grid in a few clicks.…
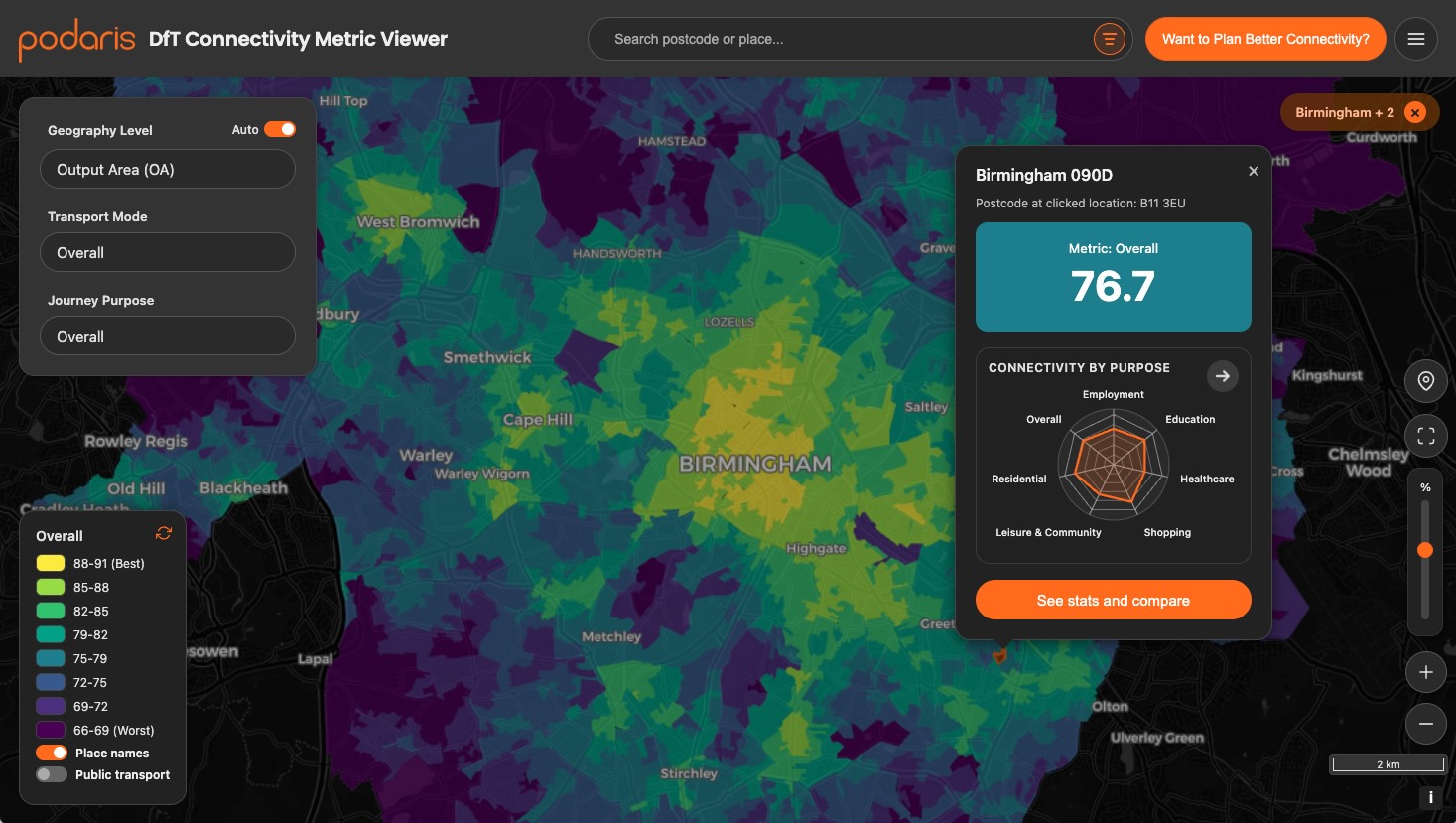
The DfT’s new Transport Connectivity Metric takes a bold step towards quantifying how well people can reach jobs, schools, and services — but how does it work, and what does it mean for planners?…
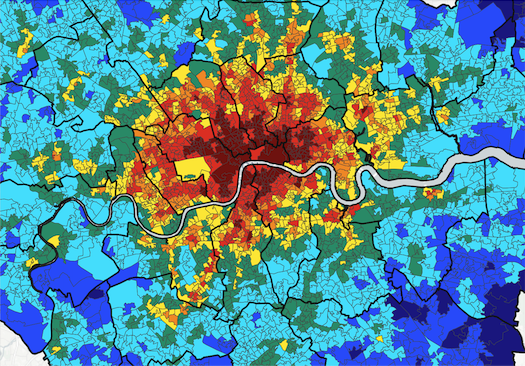
We compared London's PTAL against the DfT's new Connectivity Metric. The results expose planning risks, methodological gaps, and an urgent need for transparency in publicly-funded transport tools.…